
1.相机标定
1.1 安装摄像头驱动和标定工具包
sudo apt-get install ros-kinetic-usb-cam sudo apt-get install ros-kinetic-camera-calibration ## 标定工具包
标定需要用到棋盘格标定靶,点击此处查看下载标定靶,里面checkboard.pdf文件。
1.2 开始标定
roslaunch robot_vision usb_cam.launch ##利用launch文件启动摄像头
rosrun camera_calibration cameracalibrator.py –size 8x6 –square 0.024 image:=/usb_cam/image_raw camera:/usb_cam ##启动标定程序
size 8x6 表示棋盘格内部角点数,即6行,每行8个角点。
square 0.024 表示棋盘格边长,单位为米。
启动标定程序之后会得到如下的界面:
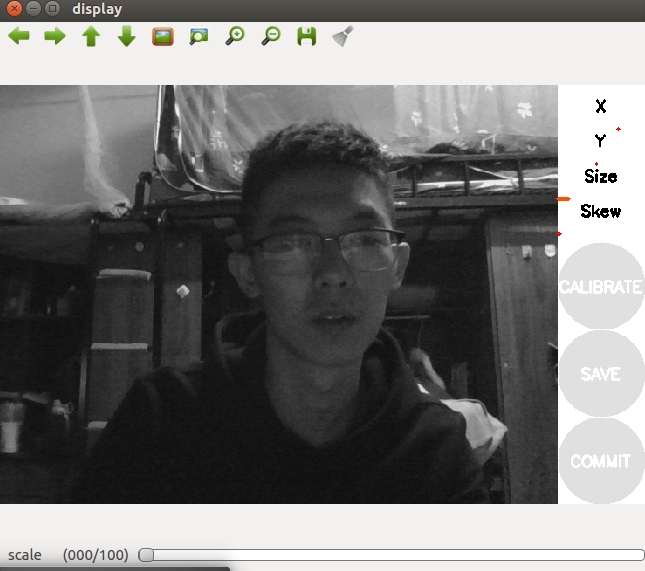
标定程序启动成功后,将标定靶放置在摄像头视野范围内,左右、上下、前后、倾斜运动。直到“CALIBRATE”按钮变色,表示参数采集完成,如图。

点击“CALIBRATE”按钮,开始计算标定参数,此时需要等待一段时间,成功后,点击“SAVE”按钮,完成标定。
在/tmp/calibrationdate.tar.gz压缩包解压后,找到ost.yaml文件,将其复制出重新命名即可使用。




